
TALOSS:三维高级定位观测潜艇软件
美国军方已采用网络中心(net-centric)作战概念,作为发展指挥速度的一种手段。根据这种方法,指挥速度包括三个部分:1) 部队获得信息优势,对战场态势的感知或理解显著优于仅仅拥有更多的原始数据;2) 行动迅速、精确和具有远程打击能力的部队实现效果的集结,而不仅仅是兵力的集结;3) 随之而来的结果是迅速阻止敌方行动路线以及紧密耦合事件带来的冲击。
这个概念中的一个重要问题是分布式军事作战系统在作战上整合的有效性,以最大限度地提高作战部队的战场态势感知能力。网络中心战需要一个通用的作战/战术图景;也就是说,必须在各个平台之间存在一个可靠且一致的通用战术图景 (CTP),以便在多兵种作战环境中提供主导性的战场态势感知能力。
实现指挥速度的挑战在于发展对整个战场态势的快速、准确的感知和理解。传统上和目前,决策者通过吸收来自多个二维显示器和纸质标绘图的数据来建立战场态势的心智模型。网络中心或分布式环境需要一种新的战场态势呈现方法——无论是在细节层面还是在呈现方式上。
TALOSS 系统的设计旨在使人们能够快速和/或准确地理解水下战场中的复杂信息。TALOSS 能够生成通用水下战术图景,其中包括威胁危险区估计、传感器接触跟踪以及自身舰船的位置和姿态,并结合导航/地形/水深信息呈现。假设这种综合的水下图景可以实现更快、更准确的决策,并提供改进的计划和决策辅助手段。
TALOSS 与 Red Hat 7.0–9.0 以及 Slackware 9 兼容,并在这些系统下进行了测试。选择 Linux 作为操作系统的原因有几个:1) 它与当前和未来的潜艇作战系统兼容;2) 它是一个通用的 UNIX 操作系统,这意味着在 Linux 下开发的软件和脚本文件可以很容易地传输到其他 UNIX 操作系统,例如 HP-UX 和 IRIX;3) 它是一个开源操作系统,拥有庞大的用户社区,可以很容易地利用这些资源进行系统优化和维护。TALOSS 由三个主要模块组成:Feeder、Bezel 和 3-D Display。图 1 是基线软件的架构图。

图 1. 基线 TALOSS 架构
Feeder 是一个程序,它读取潜艇作战控制系统 (CCS) 数据并通过 TCP/IP 套接字将其发送到主显示器。该程序可以直接链接到作战数据库,也可以通过 ASCII 输入文件运行重建和演示数据。Feeder 是一个灵活的模块,可以轻松地重新配置以导入多个数据库。由于这种灵活性,TALOSS 系统与非潜艇相关的应用兼容,例如海洋/地形 3-D 地图、3-D 速度场和 3-D 雷达/声纳地图,以及其他涉及在 3-D 环境中移动的物体的应用。
Bezel 是一个使用 Fast Light Tool Kit (FLTK) 编写的信息/控制 GUI。它控制 3-D 主应用程序 (Main App),并在一定程度上控制 Feeder 程序。除了作为系统控制器的角色外,Bezel 还充当系统状态指示器。它显示系统状态的一种方式是通过 Open Inventor 3-D 窗口显示以自身舰船(标记为 ownship)为中心的战场态势俯视图。它本质上是 3-D 场景的二维视图,为用户提供一个进入 3-D 场景的方位点,从中快速定位自身舰船的位置和姿态。Bezel 和 Main App 通过共享内存进行通信。图 2 显示了一个完整的 TALOSS 显示,其中 FLTK 控制 Bezel 与 Open Inventor 3-D 显示链接在一起。
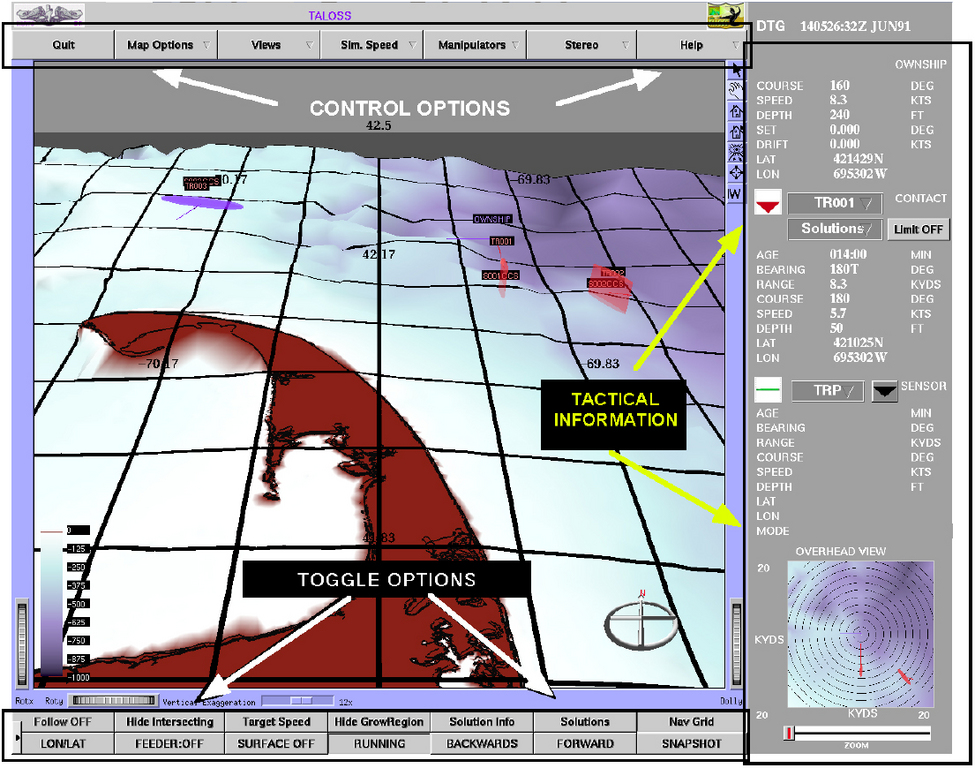
图 2. 完整的 TALOSS 显示
在图 2 中,观察 Bezel 顶部的下拉菜单。它们允许用户访问基本的 TALOSS 功能,例如退出程序、更改视图、更改地图颜色、更改深度范围限制等等。同样,在 Bezel 的底部,有两行切换按钮,用于控制在水下战场 3-D 显示器上呈现的战术信息。
Bezel 的右侧与顶部和底部不同,其目的是提供相关的战术信息,例如:1) 自身舰船、目标和武器信息;2) 目标和传感器选择状态;3) 数字目标包容区域信息。此外,由于整个系统与一个通用的操作时钟同步,该时钟的时间以海军日时组 (DTG) 格式给出,因此它也显示在 Bezel 的右上侧。图 3 显示了 Bezel 右侧的代表性图示,并附有相应的功能描述。
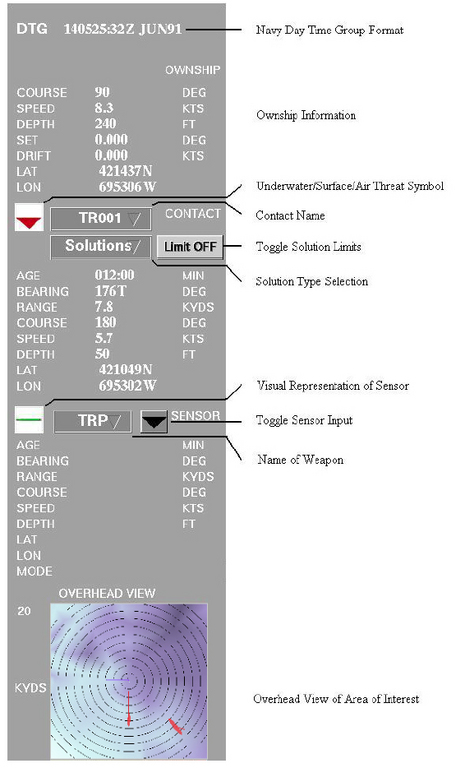
图 3. 右侧 Bezel 功能
3-D 水下战场显示器从 Feeder 程序接收其战术信息。它从启动时加载并根据战术态势的演变而更新的数字航海图数据库接收地图和导航信息。所有导航信息都预渲染为 Open Inventor 二进制文件,称为导航瓦片。Main App 将所有战术和导航信息组合成一个全面的 3-D 图片,使用计算机平台独立的场景图 Open Inventor 进行渲染。
3-D 显示器的左下角包含三个场景交互控件。Rotx 滑块绕屏幕上水平方向的假想 x 轴旋转场景。Roty 滑块绕屏幕上垂直方向的假想 y 轴旋转场景。垂直夸张滑块条更改场景的深度比率。这用于夸大场景内的 3-D 深度。要使用任何这些滑块轮,只需将鼠标光标放在滑块上,按下并按住左键,同时在所需方向拖动光标。3-D 显示器的右下角包含一个缩放滑块。放大受到与底部的碰撞限制,此时缩放停止。
除了场景操作设备外,3-D 显示器还包含七个交互按钮。这些按钮执行诸如选择联系人、场景操作、重置主视图和切换线框视图等功能。
其他值得注意的 3-D 显示功能包括一个自由浮动的 3-D 指南针,可同时指示方向和 3-D 场景方向,以及一个指示深度阴影的色条。深度阴影是颜色图和所选深度范围的组合。图 4 说明了这些功能。
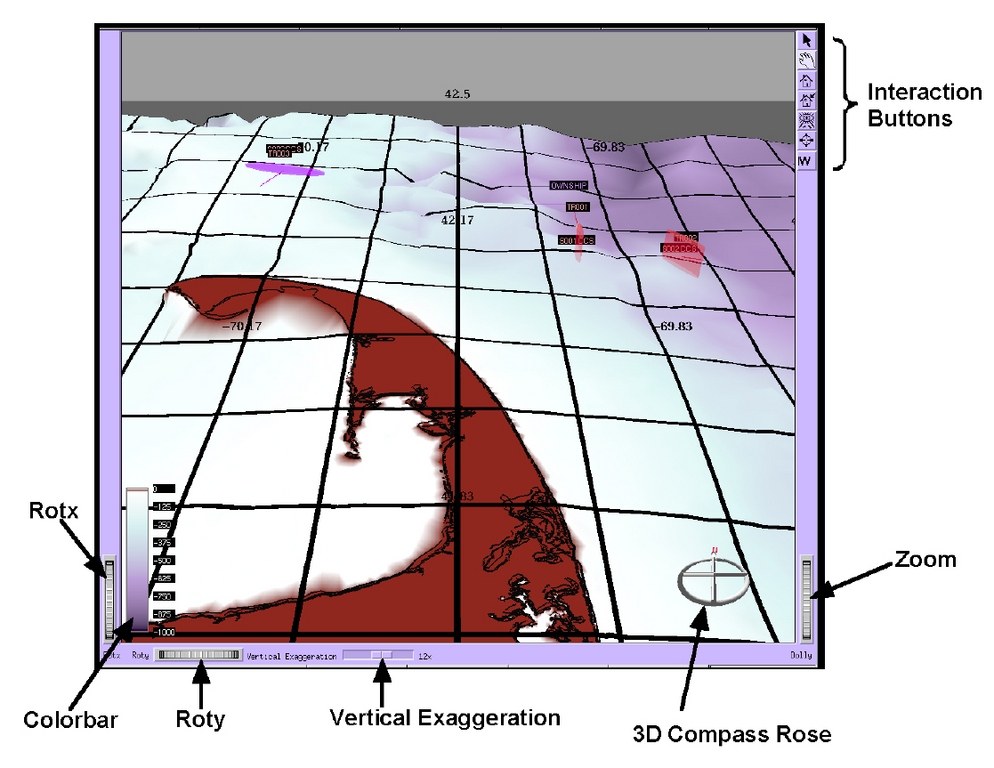
图 4. 3-D 显示功能
战术显示器的目的是让操作员了解所有物体相对于操作员自身位置的位置感。这在 TALOSS 中通过一系列以自身舰船为中心的同心距离环来实现。距离环代表设定的间隔,允许操作员立即、直观地确定任何特定物体与自身舰船的距离。此信息在避碰和威胁评估中尤为重要。这些环在 3-D 显示器和 Bezel 中显示的俯视图中均有显示。
任何战术或态势感知显示器的重要组成部分是对地球上位置的精确了解。TALOSS 使用两种方法支持导航信息。第一种是导航网格标记系统,该系统为纬度和经度的十度。由于所有纬度的距离都相等,因此纬度为十海里。由于经度线之间的距离随纬度而变化,因此经度线之间的海里数取决于纬度。对于温带纬度,约为十海里。其次,除了恒定纬度/经度线外,3-D 地图上还会出现指示纬度和经度的字母数字值。这些值和导航网格线均从数字航海图数据库中提取。导航网格与距离环显示切换;但是,字母数字标记始终显示。图 5 显示了启用所有导航信息的 3-D 显示视图。
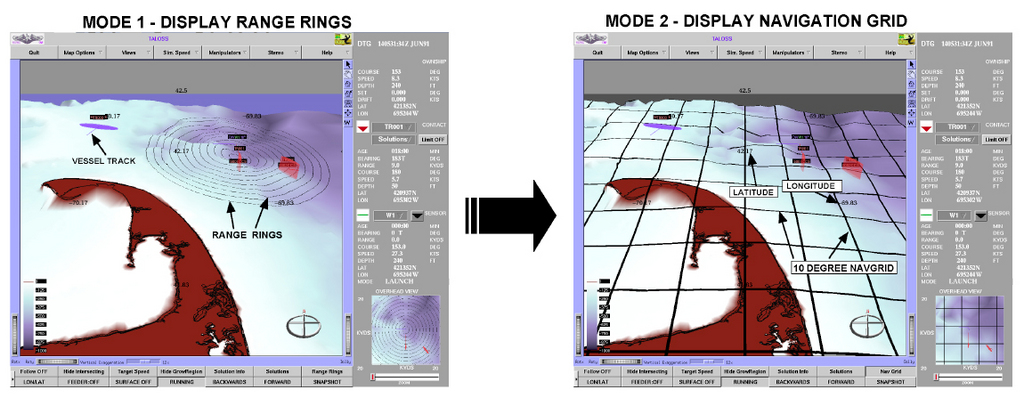
图 5. 导航和跟踪信息
态势感知显示器最重要的组成部分是视觉上跟踪和集成所有移动物体的能力。在 TALOSS 中,实线表示所有已知物体的估计轨迹。与轨迹相关联的是指示意图的颜色方案,意图可以是敌对、友方或中立。这些分类的相应颜色为红色、蓝色和黄色。由于当前版本的 TALOSS 专为潜艇应用而设计,因此它还包括武器的轨迹,包括自身舰船和敌对武器。自身舰船武器的颜色方案为绿色,敌对武器的颜色方案为橙色。但是,此颜色方案很容易针对其他应用进行修改。图 5 说明了几个联系人以及自身舰船的轨迹。所有联系人的轨迹都标有 Bezel 的联系人窗口中定义的标签。
除了跟踪信息外,TALOSS 还为潜在的危险区域进行簿记,将其作为 3-D 包容区域。用于轨迹的相同颜色方案适用于这些包容区域:红色、蓝色和黄色。图 6 显示了一个典型的 3-D 包容区域。包容区域被计算并显示为复杂的体积形状。包容区域选择由 Bezel 控制。Bezel 允许包容区域高亮显示和选择促成特定包容区域的联系人。
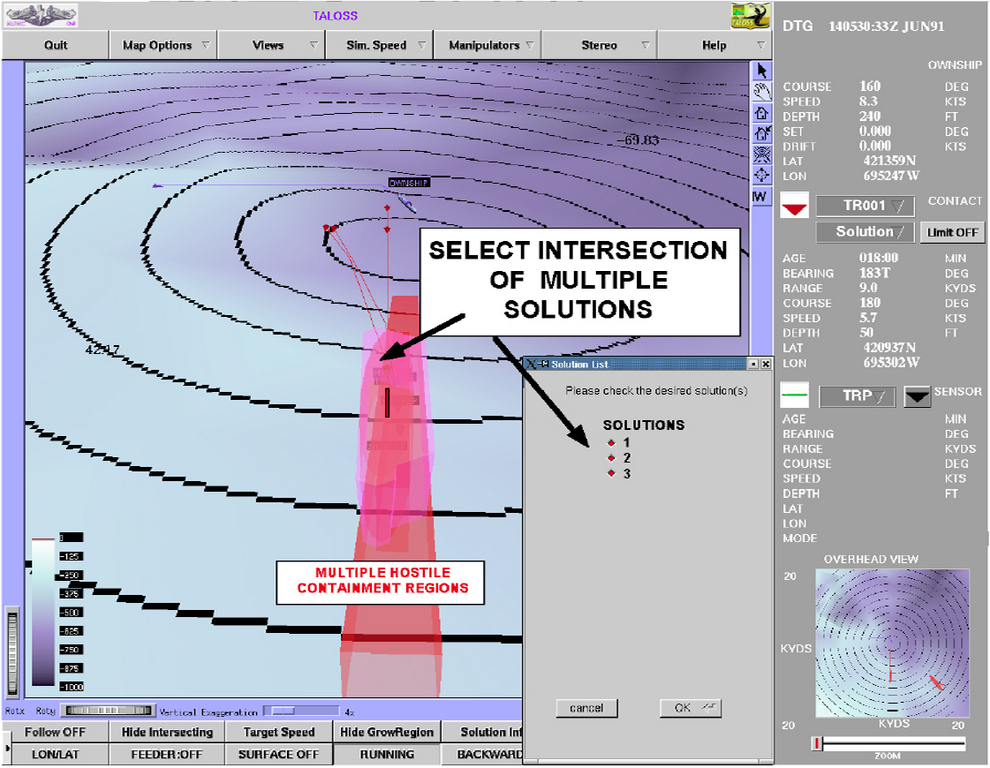
图 6. 3-D 包容区域
可以增长和相交包容区域以模拟船舶随时间的运动。区域的增长表示当失去对该船舶的精确传感器接触时,该船舶可能占据包容体积内的所有可能位置。当获得有关船舶的传感器更新时,该更新的信息(以新的 3-D 包容体积的形式)可以与先前增长的 3-D 体积相交,以提取一个大大减小的公共体积(参见图 7)。这个公共体积具有包含感兴趣船舶的最高概率。军事作战系统的目标是快速“定位”威胁包容体积,以便可以迅速引发适当的战术响应。换句话说,战斗或逃跑。
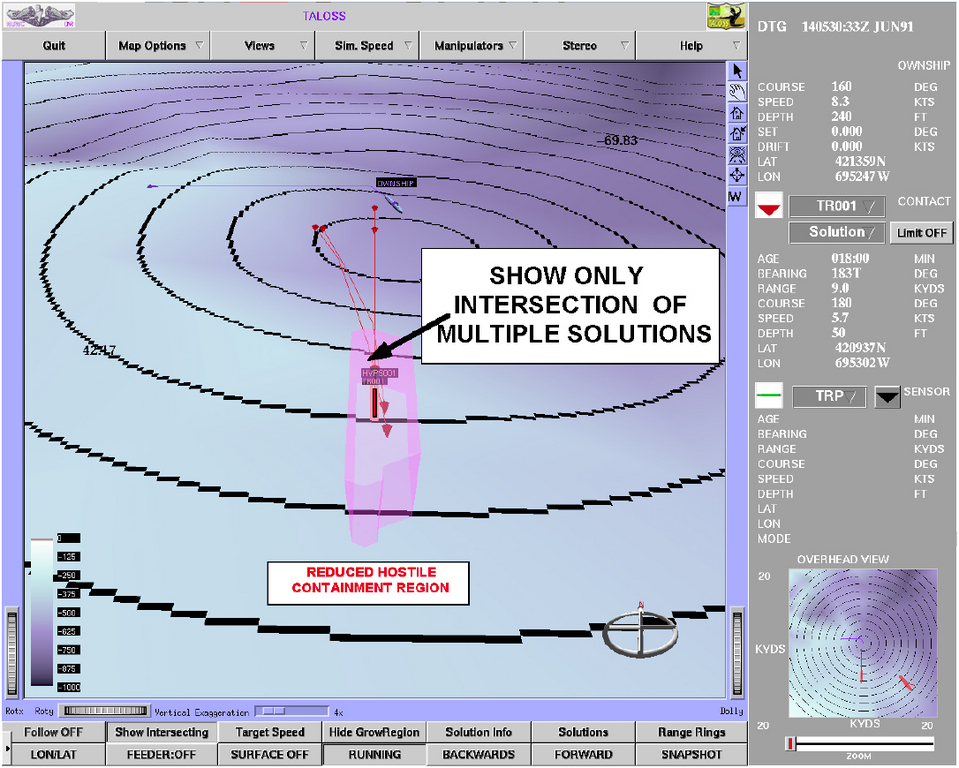
图 7. 3-D 相交区域
亚利桑那州立大学已为 TALOSS 开发了两个或多个非连续体积相交的开创性软件。使用 Linux 操作系统进行软件开发的主要优势之一是,可以在大学或其他开源站点以低廉的成本完成对特定感兴趣领域的研究。使用 Linux 意味着参与研究的合作伙伴无需购买昂贵的开发平台,例如 Hewlett-Packard TAC 或 Silicon Graphics 工作站。相反,他们可以在廉价的基于 Linux 的 PC 系统上轻松开发集成到作战系统中的代码。美国政府正在鼓励在美国军方中使用商用现货 (COTS) 产品进行开发和部署,这既是一种节省成本的措施,也是确保产品得到广泛长期支持的一种手段。将 Linux 用作军事系统的开发和操作环境是 COTS 在行动中的完美示例。
灵活、模块化的 3-D 数据融合可视化系统在军事和民用应用中都具有广泛的适用性。在美国海军研究办公室 (ONR) 的赞助下,位于罗德岛州纽波特的美国海军水下作战中心创建了这样一个系统,用于可视化和集成潜艇水下战场。该系统 TALOSS 旨在集成各种数据库,包括民用和军用数据库。由于该软件是模块化的,并且编写为在 Linux 下运行,因此它有可能作为开源渲染和数据融合引擎进行转换。
在资金允许的情况下,该项目的最终目标是开发一个完全模块化的 TALOSS 工具包,其中未分类的部分将作为开源软件提供给民用用途。发布此版本的首要动机有两个:1) 该软件是用公共资金开发的,如果国家安全不受损害,则应向公众提供,2) 通过提供该软件的未分类部分,希望开源社区对其操作的改进可以纳入该软件的机密部分,从而增强其操作。
资源
“海军转型路线图,海上打击、海上盾牌、海上基地”,美国海军部,华盛顿特区,2002 年(未分类)。在线获取地址:spica.gl.nps.navy.mil/ORarchives/SEA-TRIAL/NavalTransformRdMap.pdf。
K. Lima,“多兵种作战规划和执行可视化”,ONR 指挥与控制及作战系统聚会 2002,弗吉尼亚州阿灵顿,2002 年 4 月 23–25 日(未分类)。
G. M. Nielson 和 G. L. Graf,“体积建模技术在海军应用动态包容区域中的应用”,中期进展,ONR 资助 N0014-02-1-0287,亚利桑那州立大学,亚利桑那州凤凰城,2002 年 5 月 15 日(未分类)。
R. Shell、L. Mathews、K. Lima、R. King 和 F. Das Neves,“水下指挥与控制可视化”,2001 年 7 月 22–26 日,第七届年度联合航空航天武器系统支持、传感器和模拟研讨会暨展览会 (JAWS S3) 会议记录,加利福尼亚州圣地亚哥,2001 年,第 8 页。
Douglas B. Maxwell 目前是海军水下作战中心武器和对抗措施分部(代码 2213)的成员。他于 2001 年获得路易斯安那理工大学机械工程硕士学位。
Richard Shell 是罗德岛州纽波特海军水下作战中心分部的电气/计算机工程师。Richard Shell 目前在 3-D 可视化方面的工作已在 2002 年的联合航空航天武器系统支持、传感器和研讨会 (JAWS S3) 上获得邀请论文和演讲,并在 2002 年意大利拉斯佩齐亚举行的欧洲水下防御技术会议 (UDT) 上获得论文/海报展示。
